¶ What Is Vision Zone?
A Vision Zone lets you define specific sections of your yard where Yarbo should use different obstacle avoidance settings than the rest of the area.
For example:
- Your main area is set to Gentle Contact, but you want Yarbo to be more cautious around flower beds.
- You can draw a Vision Zone there and set it to Sensitive Bypass, so Yarbo slows down earlier and avoids objects with greater distance.
Vision Zone settings always take precedence over area-level obstacle avoidance settings.
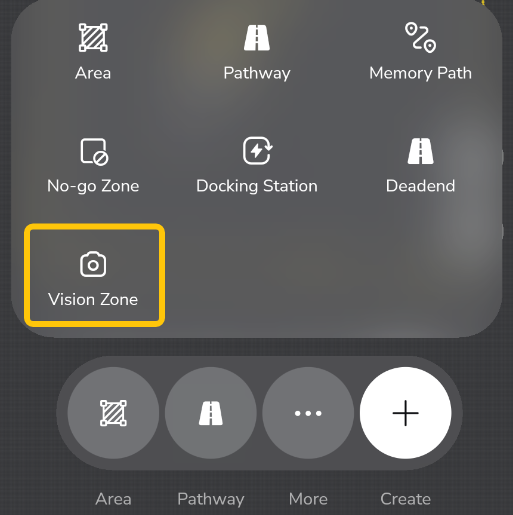
¶ How to Create a Vision Zone
| Go to Edit Map → Create → Vision Zone. |
 |
|
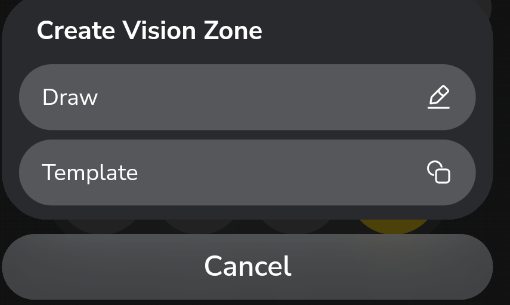
Choose one of the following methods:
|
 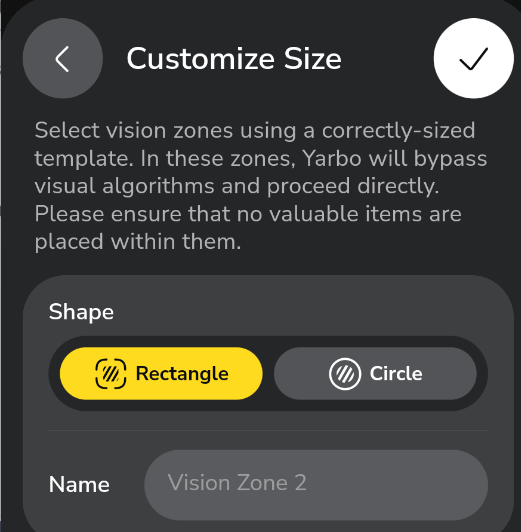 |
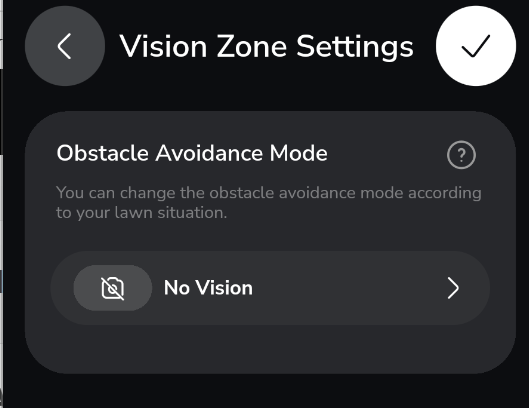
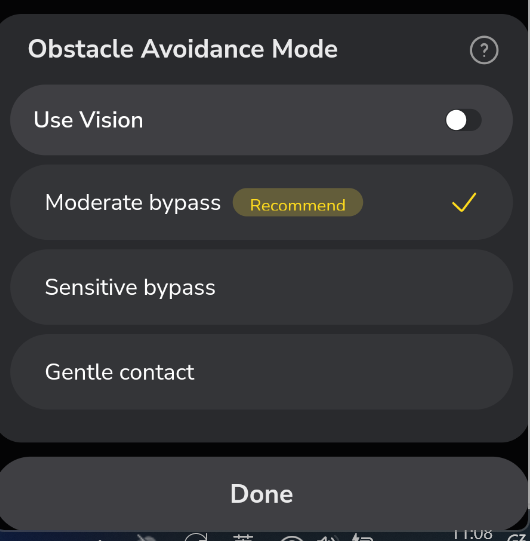
Once drawn, tap Next to configure the obstacle avoidance mode for that Vision Zone.
💡 Tip: You can create multiple Vision Zones with different avoidance modes in the same work area.
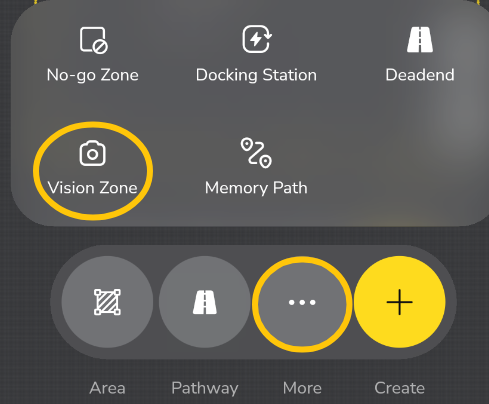
¶ How to Edit or Manage Vision Zones
| From the map editing interface, tap More → Vision Zone. |
 |
|
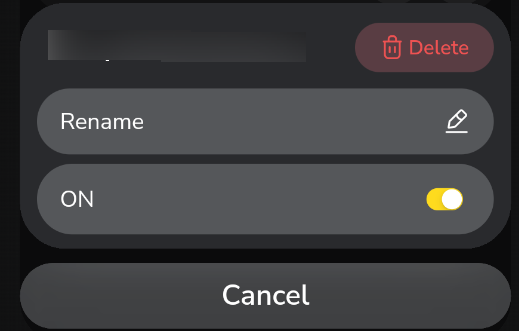
Here you can:
|
  |
|
 |
Note: All previous No-Vision Zones will be automatically converted into Vision Zones with the “Use Vision” setting disabled.
¶ FAQ
¶ Q: What’s the difference between using Gentle Contact with Vision and without Vision?
| Mode | Behavior |
|---|---|
| With Vision Enabled | Yarbo uses its cameras to detect obstacles early and slows down as it approaches them. When close enough, it makes gentle contact using the bumper and then navigates around smoothly. |
| With Vision Disabled | Yarbo ignores visual input in this zone and relies only on bumper sensors to detect obstacles. It will physically touch objects before deciding how to navigate around them. |
¶ Why Use Vision Zones?
- Customize obstacle sensitivity for delicate areas like gardens or uneven terrain.
- Improve performance in zones where visual detection may be unnecessary or less reliable (dense bushes, shaded areas, etc.).
- Maintain full flexibility — mix Vision-enabled and Vision-disabled zones for the best balance between precision and efficiency.